
Haydi, Beraber Mini Sumo Robot Yapalım!
Merhaba! Bu yazımda sizlere Mini Sumo Robot yapımından bahsedeceğim.
 Öncelikle geçen yıllarda gerçekleştirilen Sumo Robot yarışmasıyla ilgili neler yaptığımızdan bahsetmek istiyorum. FLL Robotic yarışmasında yer aldıktan sonra, Mesut Çalışkan ile Mini Sumo Robot yarışmalarına da katılmaya karar verdik ve bu yarışma için bir takım oluşturduk. Takımımıza Ayberk Erdal ve Burak Uçar’ı da dâhil ettik. Daha öncesinden geliştirmiş olduğumuz 1 adet Sumo Robot’umuz vardı.
Öncelikle geçen yıllarda gerçekleştirilen Sumo Robot yarışmasıyla ilgili neler yaptığımızdan bahsetmek istiyorum. FLL Robotic yarışmasında yer aldıktan sonra, Mesut Çalışkan ile Mini Sumo Robot yarışmalarına da katılmaya karar verdik ve bu yarışma için bir takım oluşturduk. Takımımıza Ayberk Erdal ve Burak Uçar’ı da dâhil ettik. Daha öncesinden geliştirmiş olduğumuz 1 adet Sumo Robot’umuz vardı.
Geleceği Yazanlar’ın topluluk yönetimini gerçekleştiren Artistanbul, robotlarımızdan birine sponsor oldu. Sumo Robot yarışmalarında geliştirilen robotun diğer robotlardan ne gibi farklılıklar yarattığı son derece önemlidir. Biz de geliştirdiğimiz robotumuzda zımpara kağıdı ile kızılötesi ışını soğuran bir teknik uyguladık. Bu sayede diğer robotların bizi algılamasını bir nevi azalttık. İlk defa katılmamıza rağmen gayet iyi bir sonuç elde ettik. Aynı zamanda bu süreçte birçok şey öğrendik.
Sumo Robot’umuzun geliştirme ve yarışma aşamalarını merak edenler için videolarımız burada:
Sumo Robot yarışmalarına da değinmek istiyorum. Sumo Robot yarışmaları, Dohyo adlı özel bir alanda aynı sumo güreşlerinde olduğu gibi birbirlerini iterek, rakibini alandan çıkarmaya çalıştıkları mücadeledir. Sumo robotlar, robotikle hobi olarak ilgilenenlerin Japon Sumo Güreşleri’nden esinlenerek aynı güreşi robotlara yaptırmak istemeleriyle ortaya çıkmıştır. Sumo Robot yarışmalarına katılabilmek için geliştireceğiniz robotun daha öncesinden belirlenen katılım kriterlerine uygun olması gerekmektedir. Yarışma katılım kriterlerine bu bağlantıdan göz atabilirsiniz.
Sumo Robot yapımı için gerekli malzemeler
 |
 |
| 6V 1000 RPM redüktörlü mikro DC motor (2 adet) |
32x7mm siyah tekerlek çifti (1 adet) |
 |
 |
| 80cm menzilli kızılötesi sensör – MZ80 (3 adet) |
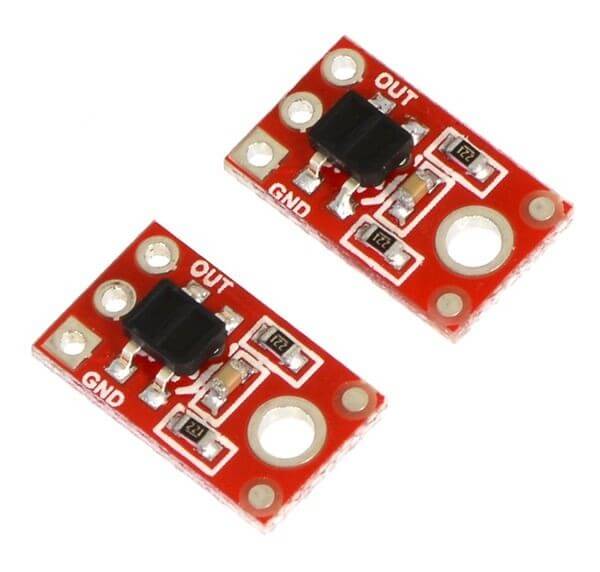
QTR-1A kızılötesi sensör çifti (1 adet) |
 |
 |
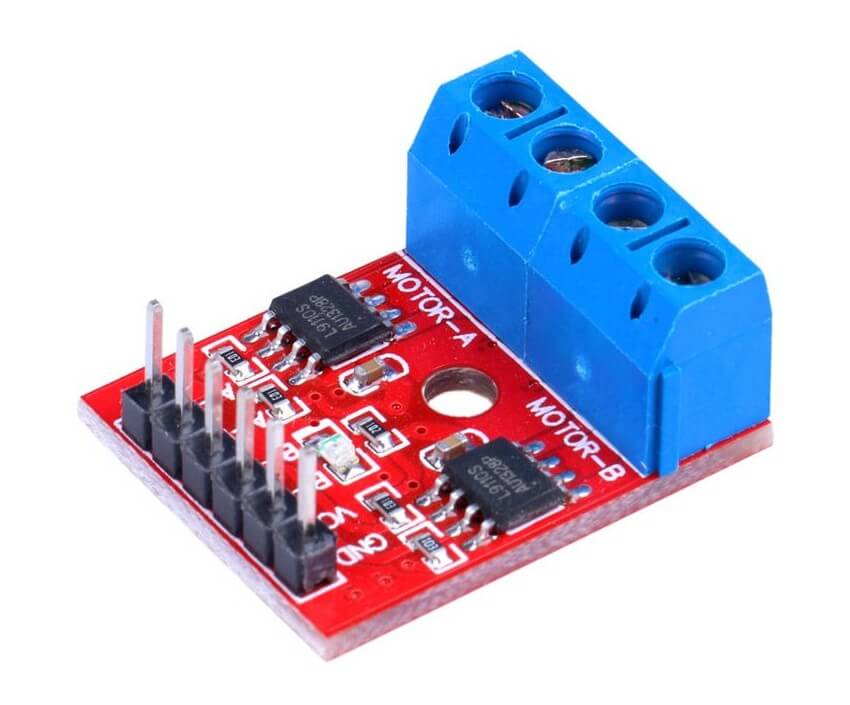
| L9110 çift motor sürücü kartı (1 adet) |
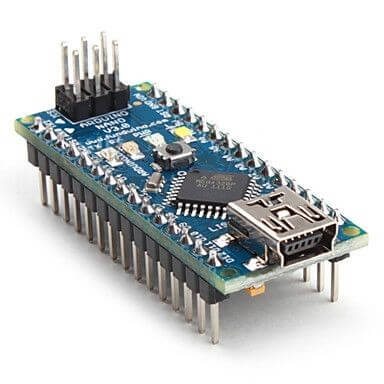
Arduino Nano 328 (1 adet – isteğe bağlı) |
 |
 |
| 7,4 LiPo batarya 450mAh 25C (1 Adet) |
Siyah Mini Breadboard (1 Adet – İsteğe Bağlı) |
 |
 |
| SKY RC LiPo şarj aleti (1 adet – isteğe bağlı) |
Sarhoş teker metal 95mm (1 adet – isteğe bağlı) |
Sumo Robot’u modellemek
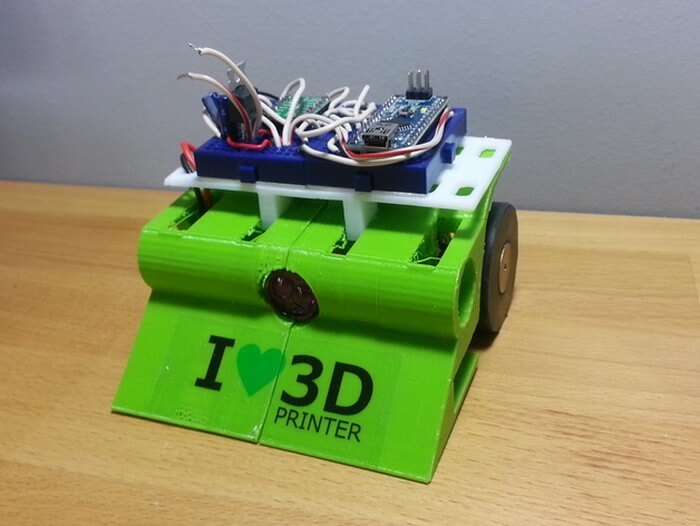
Ben, ofisteki Ultimaker 2 3D yazıcıda hazır bir modeli bastım. Modeli Thingiverse isimli web sitesinden indirebilirsiniz.
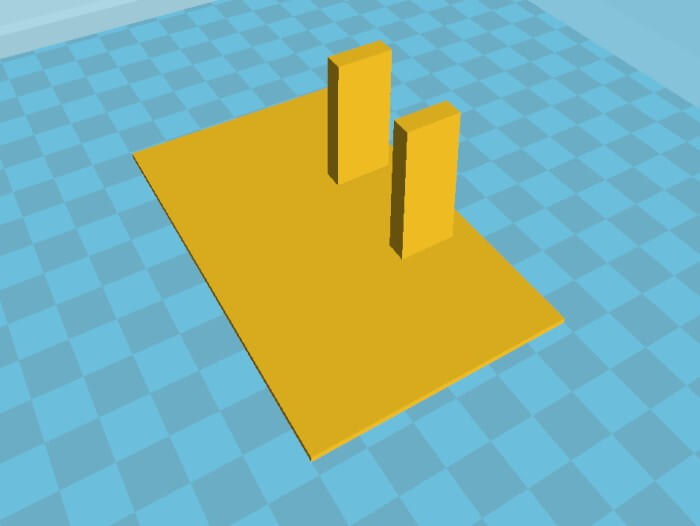
Breadboard aparatı olmadığı için kendim modelledim. Modeli buradan indirebilirsiniz.
Sumo Robot’un yazılımını geliştirmek
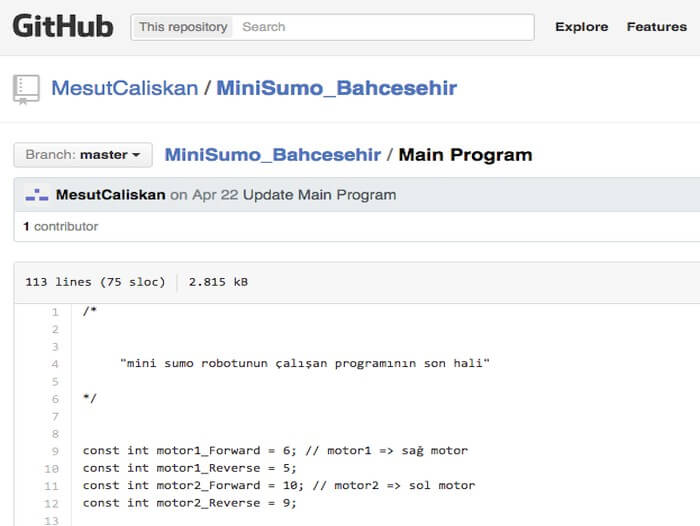
Kodlarımızı sizlerin de geliştirebilmesi için Mesut Çalışkan’ın Github hesabından yayınladık. Ayrıca diğer sensörlerin kullanımını öğrenirken geliştirdiğimiz kodları da paylaştık.
Tüm kodlara ulaşmak için tıklayınız.
Sumo Robot’un yapımı
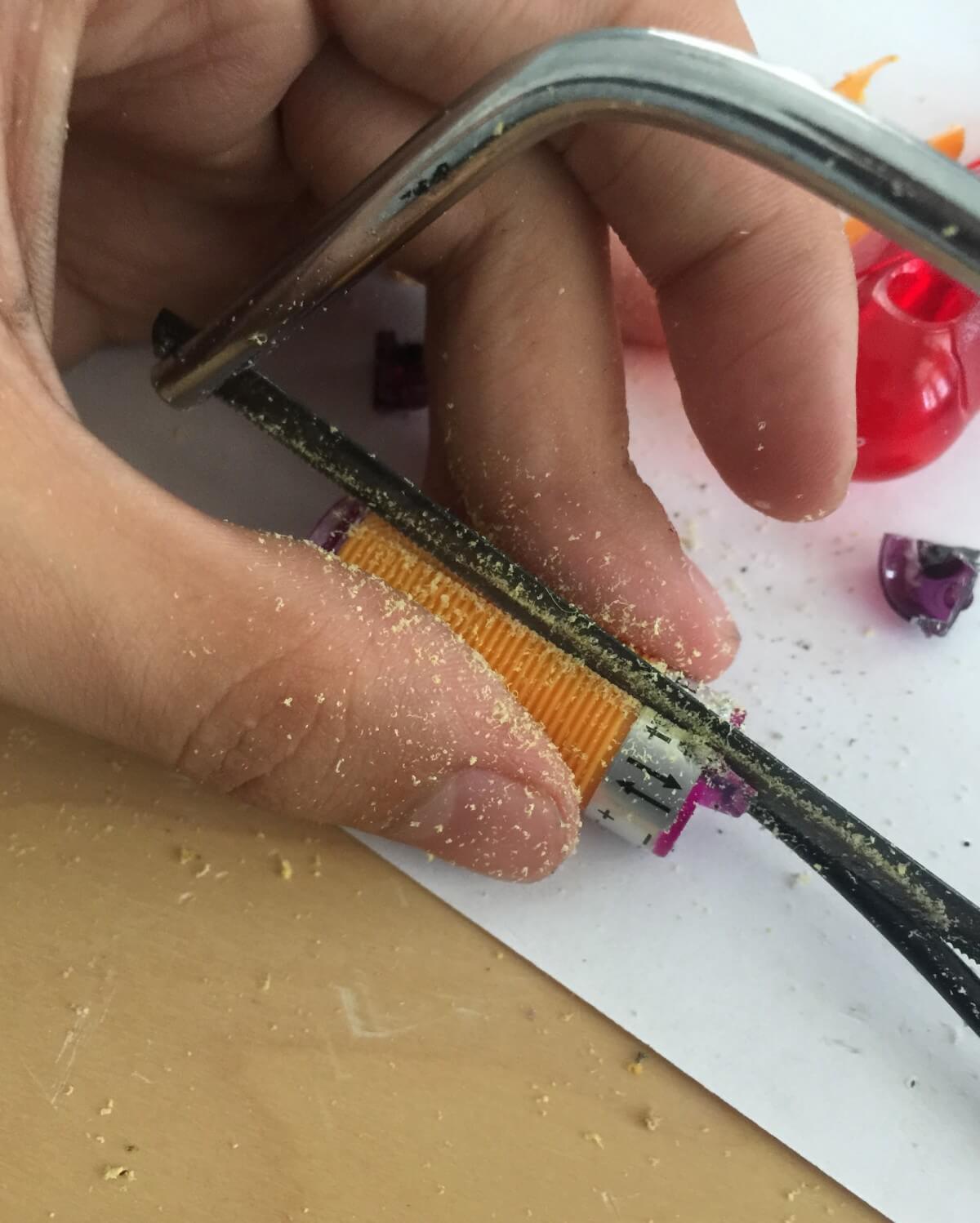
Robotumuzun yapımına başlamadan önce iki adet MZ80 sensörümüzü daha az alan kaplaması için modifiye etmemiz gerekecek. Bunun için keskin bir araç kullanacağız; ben kıl testeresini tavsiye ederim. Sensörümüzün ortasından kesmeye başlıyoruz. Kafasındaki lense zarar vermemeye ve kesme işleminde kendimize zarar vermemek için dikkatli olmaya özen gösterelim.
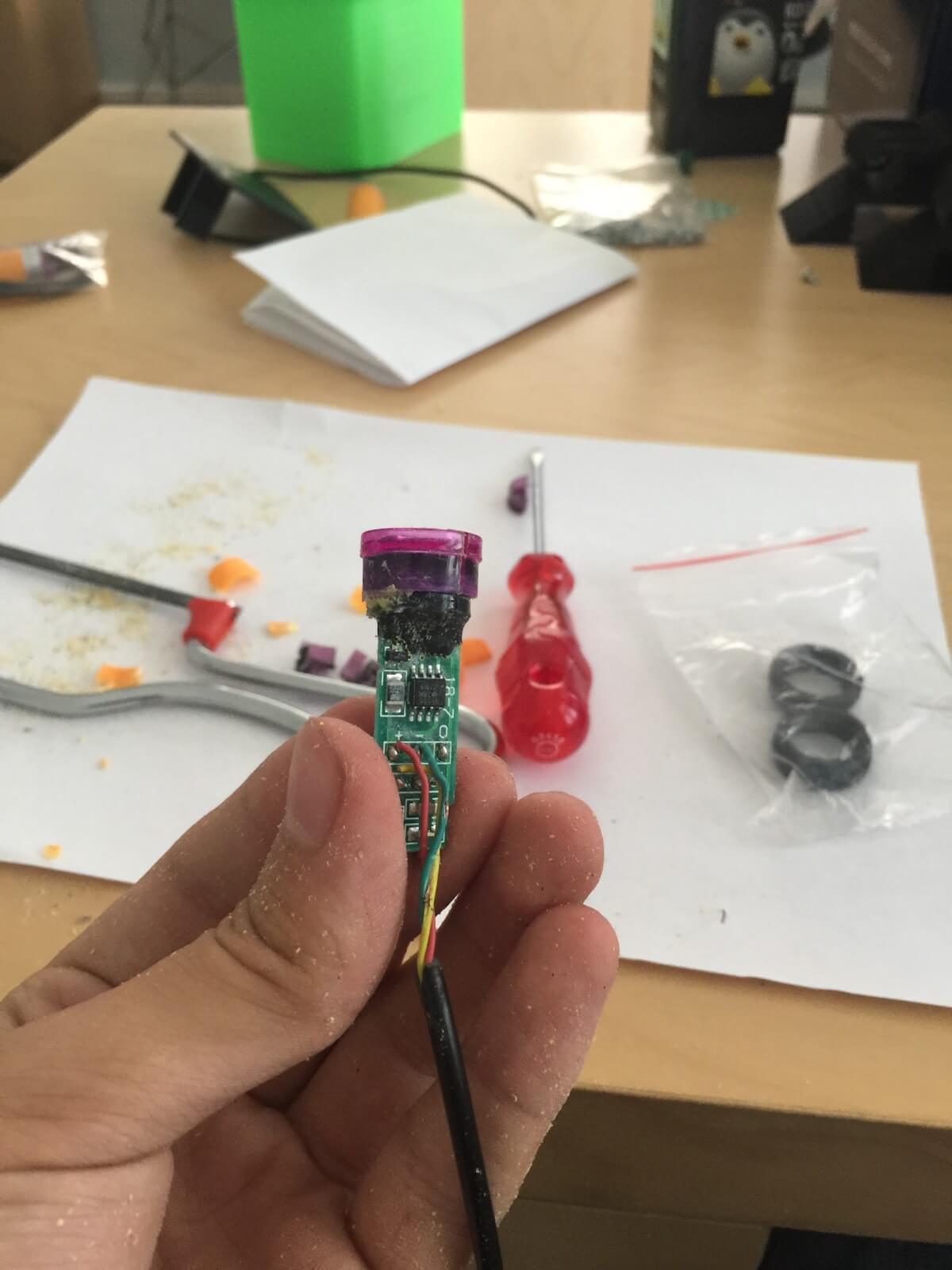
MZ80 sensörümüzü modifiye ettikten sonra, basmış olduğumuz gövdemizin sağında, solunda ve önünde bulunan boşluklara sabitleyelim.
DC motorların hazır hale getirilmesi
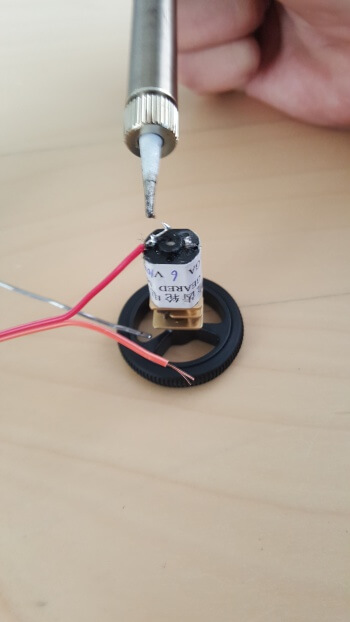
DC motorlarımız için 4 adet dişi-erkek kablonun dişi kısmını soyalım. Ardından DC motorların arkasındaki deliklere lehimleyelim.

DC motorların motor sürücüye bağlanması
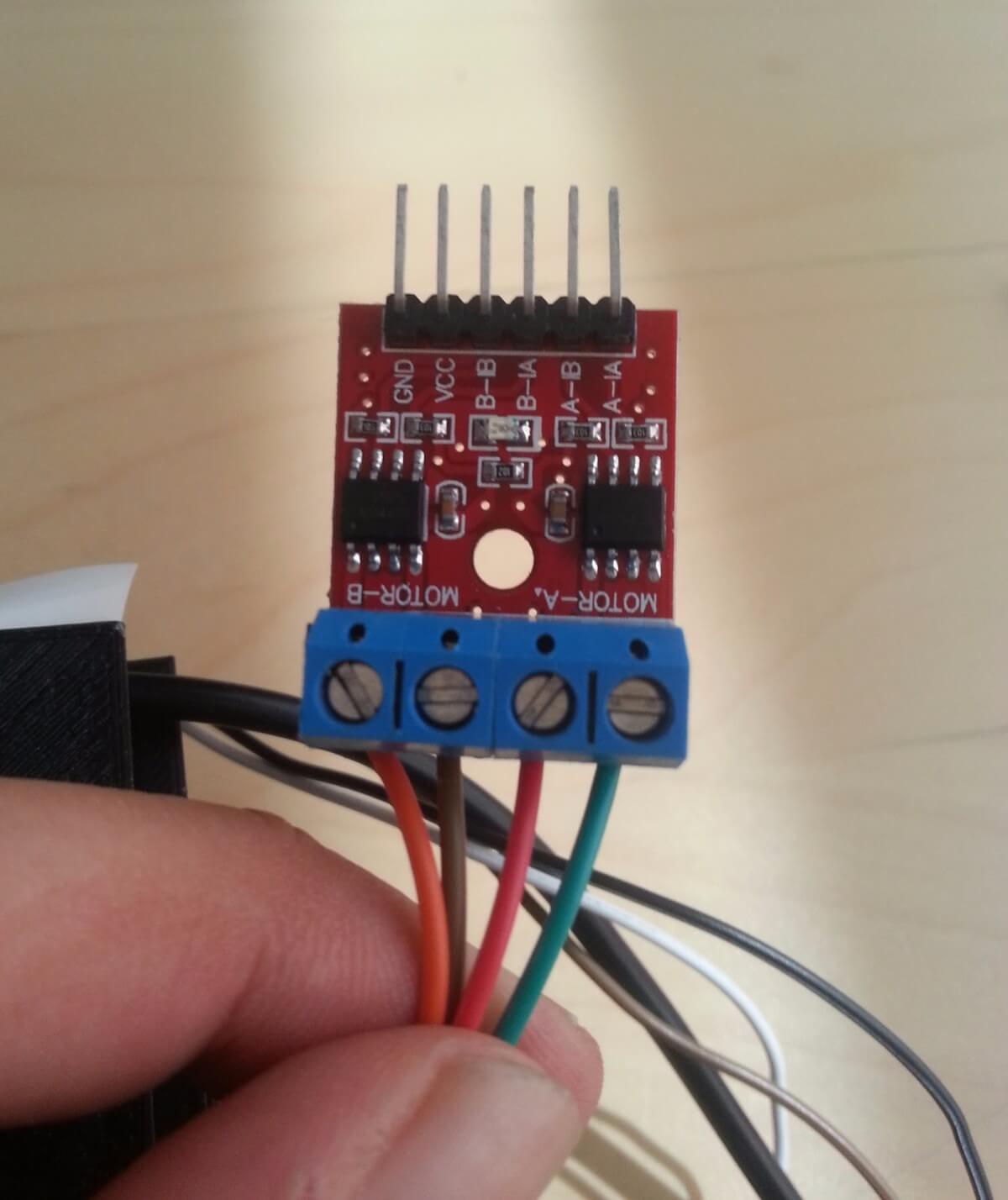
Lehim işlemimiz bittikten sonra, motorlarımızın kablolarını yukarıdaki delikten dışarı uzatıp, motor sürücümüze bağlayalım. Motor sürücümüze bağlantısını aşağıdaki gibi yapınız.

QTR1-A sensörünün bağlanması ve gövdeye yerleştirilmesi
Robotumuzun altındaki deliklere QTR1-A sensörlerimizi takıyoruz ve içerideki delikten jumper kablolarımızı bağlıyoruz.
Sarhoş tekerlerin ve LiPo pillerin gövdeye yerleştirilmesi
Robotumuzun altındaki büyük yere LiPo pilimizi koyuyoruz. İsteğimize bağlı olarak robotun altına sarhoş teker de takabiliriz.

Gövdenin birleştirilmesi
Bütün yerleşimleri sağladıktan sonra, sensörlerimizi gövdeye silikonlayabilir veya yapıştırabiliriz.

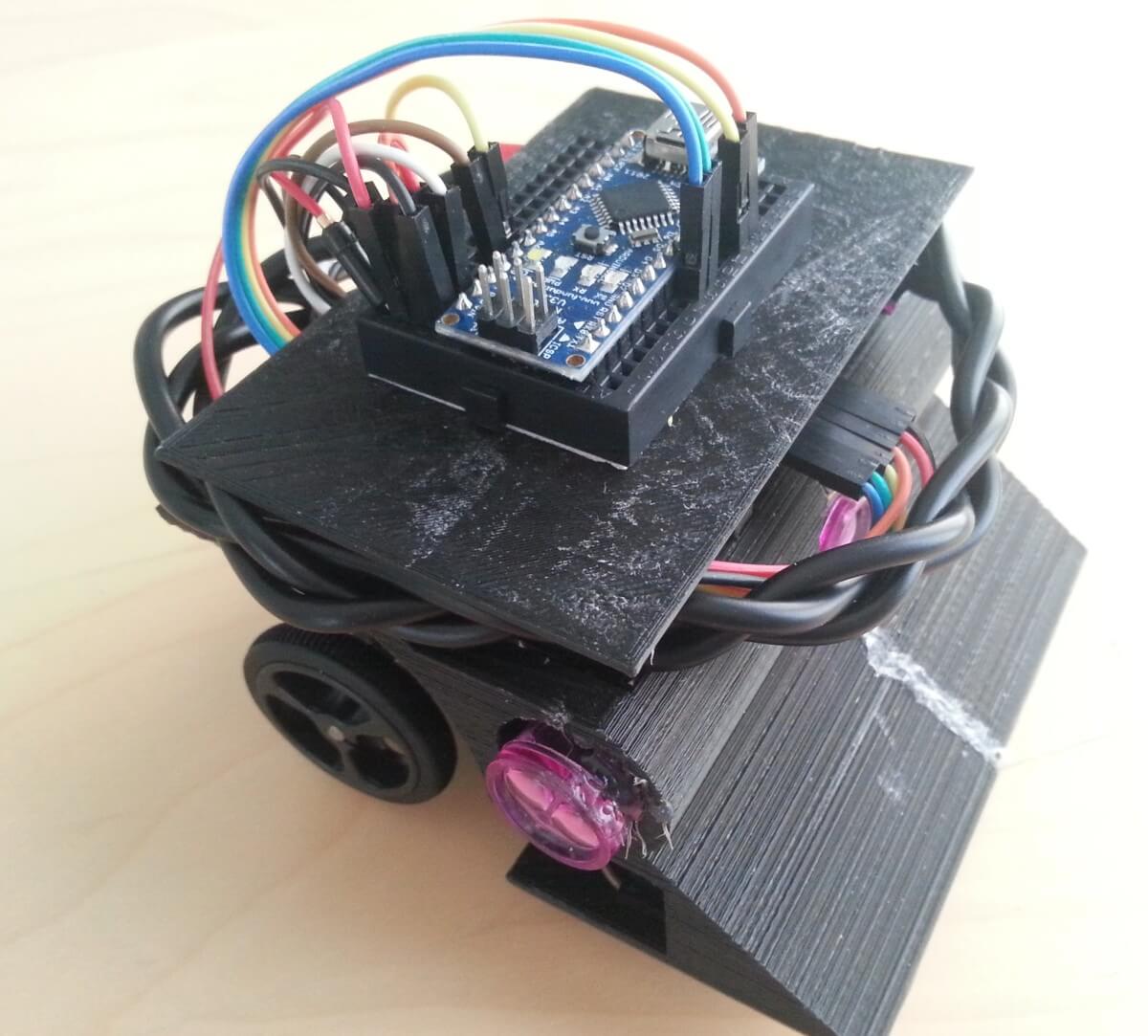
Breadboard yerleşimi ve kablolamaların yapılması
Breadboard aparatını gövdenin üstüne silikonlayalım ve breadboard’umuzu üstüne yapıştıralım.
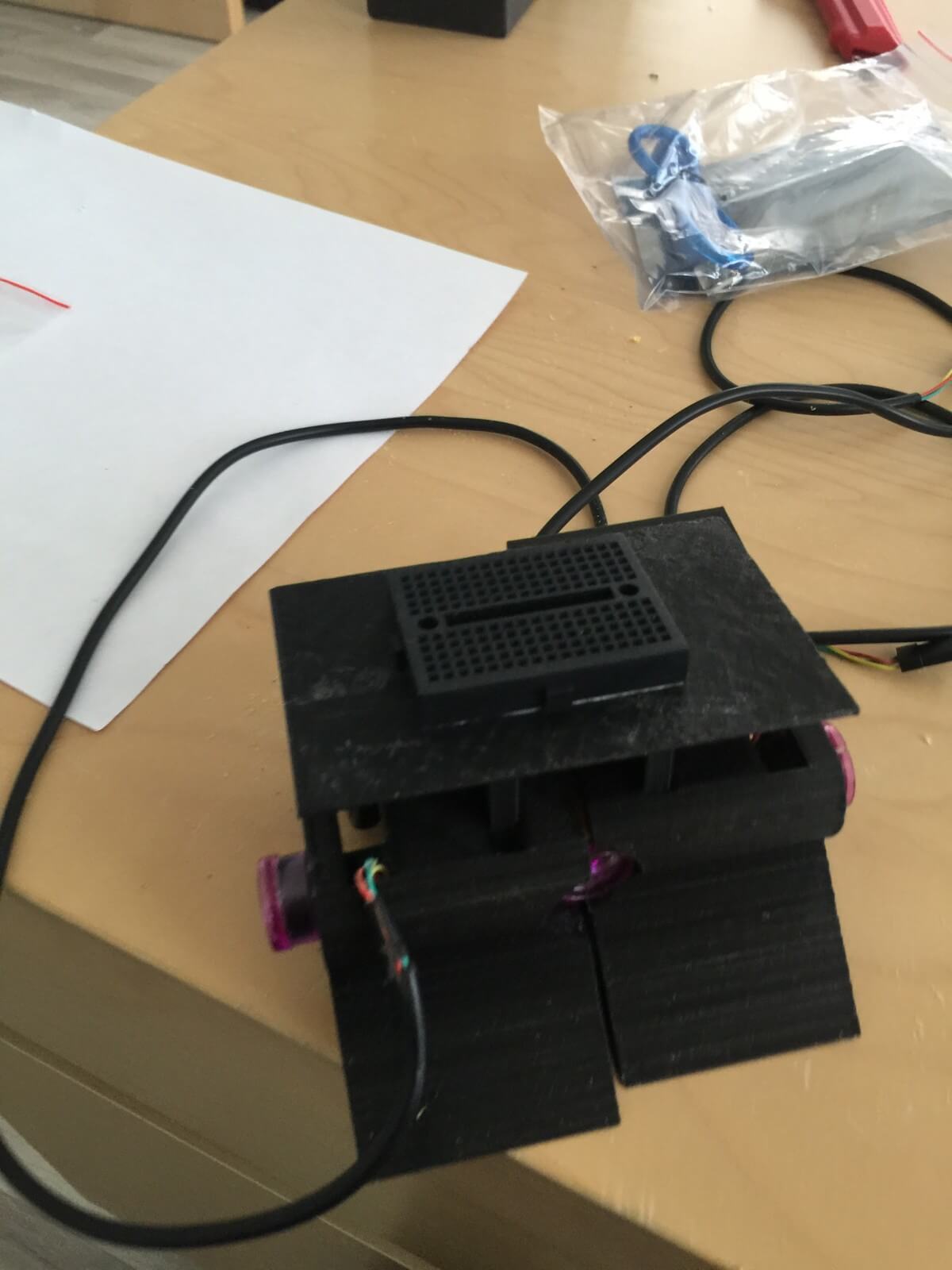
Arduino Nano’muzu breadboard üzerine yerleştirdikten sonra tüm bileşenlere ait kablolama işlemini gerçekleştirelim. Kabloları uzun jumper kabloları kullanmak yerine kısa olanları tercih ediniz.
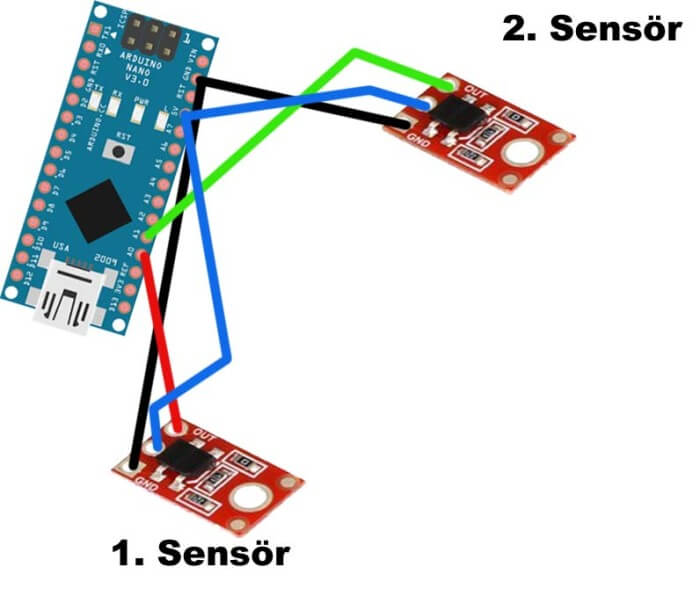
Son olarak, yazılımı Arduino Nano üzerine atarak gerekli değişiklikleri yapınız. Çalıştırmadan önce bağlantıları son bir kontrol edelim. MZ-80 sensörlerimizin bağlantısını aşağıdaki gibi yapalım:
- Kırmızı: +5V
- Yeşil: GND
- Sarı: Data Çıkışı (A2, A3, A4)
Güç kaynağımız olan Li-Po pilinin bağlantılarını yapalım. Kabloların birbirine değmediğinden emin olalım.
Artık Mini Sumo Robot yarışmalarına girmeye hazırız!
Bahahattin ates
merhaba. yaptiginiz. mini sumo robot. harika. elin koluna.saglik. harika olumus.
sizden ricam . bu robotun kodu. sitede. indirmeye. calistim. kod. olmiyor?
sizlerin. sayenizde. bu robotu. yapayim. robot merakim. cok. ondan. bende.isvecten.
elektronikle. ugrasiyoru. umarim. bu konudan. cevap. verirsiniz. tesekkurler.
allaha. emanet olun.
Bahahattin ates
merhaba . hayirli islerdilerim. size . elin koluna saglik. mini .sumo robotunuz. harika. hersey. gonlunce .olsun.
allaha emanet olun..
Ömer Faruk Göllü
Merhaba kodların tamamını mailime atabilirmisiniz kodlar olmuyor indiremedim . Şimdiden teşekkürler
Ali Işıngör
Ömer Bey merhaba,
Bu yazımızı yayınlayalı üç yıl olmuş, bir şeyler kırılmış ya da depodaki kodlar değişmiş olabilir. Kod tarafını ilgili eğitimci arkadaşlarımıza denetlettirip, en kısa zamanda güncellenmesini sağlayacağım.
Sağlıcakla-Ali Işıngör